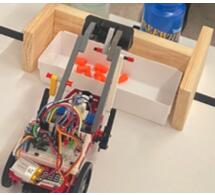
Autonomous Loader
Created a line-follower navigation algorithm for a robot equipped with an Arduino Uno, SHARP infrared sensors, and DC motors. Designed and modelled a scoop and arm mechanism using Linkage, and expanded the program to perform tasks such as scooping, carrying, and dropping dirt on queues from the infrared sensors.
Project PDF available here.
Code available on GitHub.